Project Description
Custom VR Controllers For Physical Therapies



The ultimate goal of the physical hardware that we are developing as part of the PRIME-VR2, VR-HABIT system is to provide an engaging and effective means to perform physical therapy. Currently these therapies are often repetitive and have poor levels of compliance. We are aiming to develop a controller that authentically replicates the tangible experience of therapies that are currently recommended and prescribed by clinicians and allows them to be performed in the context of a VR experience, embedding them in a rich, immersive, audio-visual world.
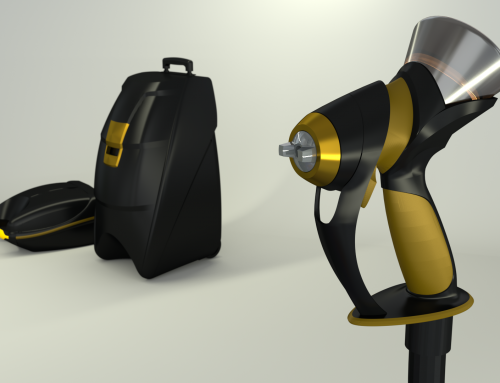
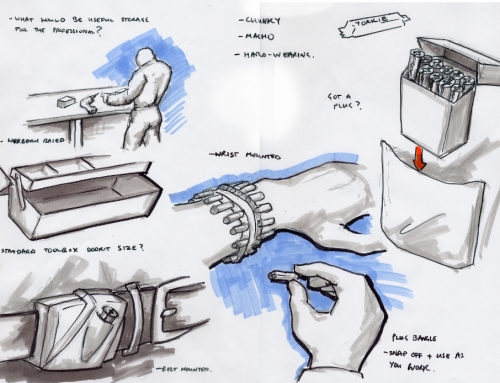
In terms of the controller as a physical object we are looking for the controller to be an integrated, compact design avoiding the bulk of some orthotic and assistive devices on the market; bristling with buckles, straps, clamps and points of adjustment. The look and feel of this device will complement the existing VR headsets on the market that they will be paired with, avoiding feelings of being medicalised in the users.
What advantages does Additive Manufacturing (AM) offer?
We are exploring taking advantage of the latest in additive manufacturing technologies here to offer bespoke elements in the controller hardware to ensure that fit, comfort and function are perfect for every user. Additive manufacturing offers a number of advantages which are of interest here, there is no initial capital cost in tooling as with injection moulding, one-off pieces become feasible and cost effective. Complex forms are also possible with a freedom not seen in other manufacturing processes, with the possibility to even vary material properties across a single component, moving from hard, rigid areas to soft and compliant features.
How can this be applied to the development of the PRIME-VR2 controller?
In developing a product which is so intimately linked to the anthropometry and biomechanics of the user, not only the sizing of components will vary but also the way in which they move, their centres of rotation, the loads and moments associated with a given exercise. By taking as input the 3D scans of the user’s arm, as explored in WP2, we can identify the key elements of the controller which benefit from personalisation. Using additive manufacturing then allows us to cost effectively deliver a controller which fits that individual perfectly with little or no need for adjustment.
Exploring the possibilities of varying material properties through 3D printed elements allows us to potentially pack greater functionality into the controller that might otherwise have needed complex assemblies of distinct components to achieve the same results.
Algorithmic approach
Given that we are dealing with users across a wide range of pathologies and ages, there may be a great deal of variation in the inputs to the generation of a given controller. The algorithmic approach we have adopted in WP3 aims to manage this complexity, identifying the key features of the arm and its biomechanics that are required as input and capturing the design intent as an algorithm that we can be sure produces a valid output.
Challenges
There are many technical challenges that we have already faced and many of course yet to be confronted in this highly innovative development. However, as with any collaborative, cross-disciplinary project, the key challenge is finding a common language to discuss and share perspectives and knowledge. In setting out to deliver a tangible VR controller that can deliver an authentic and effective replication of an existing physical therapy it is vital that the design team listen to the clinician and their patients’ lived experiences and expertise. Every stage of this project proves to be a learning experience and we are looking forward to getting prototypes into the hands of users in the coming months to get more in-depth feedback to inform the development.
Current Progress
The controller concept, system architecture and key features has been fixed in the Concept Design Schematic document delivered at the end of last year securing buy-in and sign off across the consortium. This was based on an iteration of physical testing and testing by the living labs in September and October of last year. We have just completed the latest round of prototyping for the key deliverable at the end of March (M18) of an initial working prototype. Looking beyond this we are planning to do more extensive testing with users in the living labs during the coming summer months.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}